

Mobile Laser Scanning with the NavVis MLX – How Modern Sensor Fusion Enables Stable Results in Glass Corridors and Complex Technical Rooms.
Mobile laser scanning with the NavVis MLX gives architects, engineers and facility managers the reliable data foundation that every successful project demands. At Metrika360, our goal is to ensure this planning confidence through precise as-built surveys of buildings.
To operate efficiently and with high accuracy even in demanding interior environments, we have expanded our portfolio with the NavVis MLX. With the mobile laser scanning capabilities of the NavVis MLX, the gap between static Terrestrial Laser Scanners (TLS) and mobile systems continues to close. But technical datasheets alone are not enough proof. We put the system through an intensive field test to explore the limits of 3D as-built documentation in critical environments.
1. Technology in Focus: Sensor Fusion Instead of Pure Laser Measurement
The NavVis MLX is a handheld system that captures point clouds of buildings and 360° panoramas while in motion. Its technical strength lies in how it determines its position in space.
Conventional mobile scanners often reach their limits in challenging environments. The MLX therefore uses advanced sensor fusion for the SLAM algorithm (Simultaneous Localization and Mapping):
- 32-layer LiDAR: The laser sensor captures the environment at 640,000 points per second. By distributing measurements across 32 layers, an extremely dense vertical measurement grid is created. This ensures that even delicate structures such as narrow pipes or door frames are reliably detected.
- Visual Odometry: Alongside the laser, integrated cameras continuously analyze the texture of the surroundings. This visual data supports the position calculation of the scanner in areas where the laser physically cannot provide reliable returns.
2. Mobile Laser Scanning in the Field Test: Transparency and Symmetry
In practice, building surveying presents scenarios that are considered particularly critical for mobile algorithms: large-scale glazing and long, featureless corridors.
2.1 Stability in the Glass Corridor
One of the biggest sources of error in mobile laser scanning is so-called “drift” on glass surfaces. Laser beams penetrate glass or are reflected specularly, leaving the SLAM algorithm without valid measurement points for the geometry.
In our test object, we captured a long glazed connecting corridor. Here the advantage of sensor fusion became clear: while the LiDAR data naturally provided reduced information at the glass surfaces, the visual odometry took over stabilization. The cameras oriented themselves using the textures of the floor and ceiling construction.
The result: A drift-free, geometrically correct trajectory through the entire glass corridor.

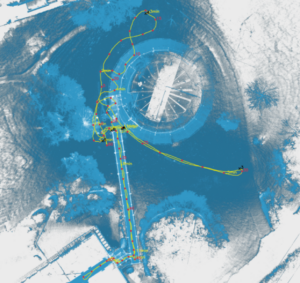
2.2 Precision in Long Corridors
The system also proved its performance in expansive basement corridors with repetitive geometry. The high point density and large field of view of the sensor enabled robust self-localization. Analysis of the trajectory shows a clean Loop Closure – the start and end point of the measurement align precisely, which is critical for the dimensional accuracy of the entire point cloud.
 3. Ergonomics in the Technical Room (MEP)
3. Ergonomics in the Technical Room (MEP)
In addition to algorithmic stability, physical handling in complex spaces is decisive for cost-effective capture. Our test took us into a technical room with low ceiling heights and dense pipework.
- Accessibility: Unlike backpack-based systems that require a certain clearance height, the MLX design allows the operator to pass under low-hanging pipes and ventilation ducts.
- Live Feedback: Via the integrated touchscreen, the surveyor can check in real time whether concealed areas (shadow zones) in the point cloud have been sufficiently captured. This is especially essential in complex MEP installations for subsequent Scan-to-BIM modelling.
4. Conclusion: Added Value for Your Building Project
The successful use of mobile laser scanning with the NavVis MLX under these demanding conditions confirms that mobile laser scanning now represents a valid solution even for complex geometries.
For you as a client, this translates into concrete benefits:
- Planning confidence: Validated as-built data even in areas previously considered difficult to capture (glass facades, long tunnels, crawl spaces).
- Cost efficiency: The high capture speed reduces time on site and minimizes disruption to ongoing operations.
- Completeness: The combination of high-resolution geometry and 360° image data delivers a comprehensive digital twin of the existing building.
Do you need mobile laser scanning with the NavVis MLX for a demanding project?
Contact Metrika360 for a no-obligation consultation.
Frequently Asked Questions – Mobile 3D Building Documentation with NavVis MLX
-
What is the NavVis MLX and how does it work?
The NavVis MLX is a handheld mobile mapping system that captures precise 3D point clouds and 360° panoramic images of buildings in real time. It combines a 32-layer LiDAR sensor with visual odometry (SLAM algorithm) to reliably determine its position in space – even without a GPS signal – at a capture rate of up to 640,000 points per second.
-
What advantages does mobile laser scanning offer over static scanners?
Mobile systems like the NavVis MLX capture large areas significantly faster than stationary Terrestrial Laser Scanners (TLS). While a TLS needs to be set up and measured at each position, the MLX scans as you walk through the building. This saves up to 60–70% of on-site time and minimizes operational disruptions.
-
Does the NavVis MLX work in glass corridors or heavily glazed areas?
Yes. This is one of the system’s special strengths. Thanks to sensor fusion – combining LiDAR with visual odometry – the MLX compensates for data gaps on glass surfaces. While the laser provides limited returns from transparent surfaces, the cameras orient themselves using floor and ceiling textures. The result: a drift-free, geometrically correct trajectory.
-
How accurate are the measurement results from the NavVis MLX?
The NavVis MLX achieves accuracy in the range of 5–20 mm in typical building environments. Critical for dimensional accuracy is the Loop Closure – when the start and end point of a measurement align precisely, it confirms the consistency of the entire point cloud.
-
Which building types or projects are best suited for mobile laser scanning?
The system is ideally suited for: as-built surveys in office buildings, hospitals, and industrial facilities; technical rooms with dense pipework and low ceiling heights; glass corridors and atriums; expansive basement corridors and underground car parks; and buildings in active use, where disruptions must be minimized.
-
How does the NavVis MLX differ from backpack-based systems?
Backpack-based systems offer high mobility but often require a certain clearance height and can be unwieldy in confined spaces. The NavVis MLX is carried by hand and can easily pass under low-hanging pipes, ventilation ducts, or utility lines – a decisive advantage in technical rooms and basements.
97297 Waldbüttelbrunn
wuerzburg@metrika360.de
95512 Neudrossenfeld
bayreuth@metrika360.de
80637 München
muenchen@metrika360.de
44149 Dortmund
dortmund@metrika360.de